iNous: Building an Eco-System for Indoor Spatial Information
Summary
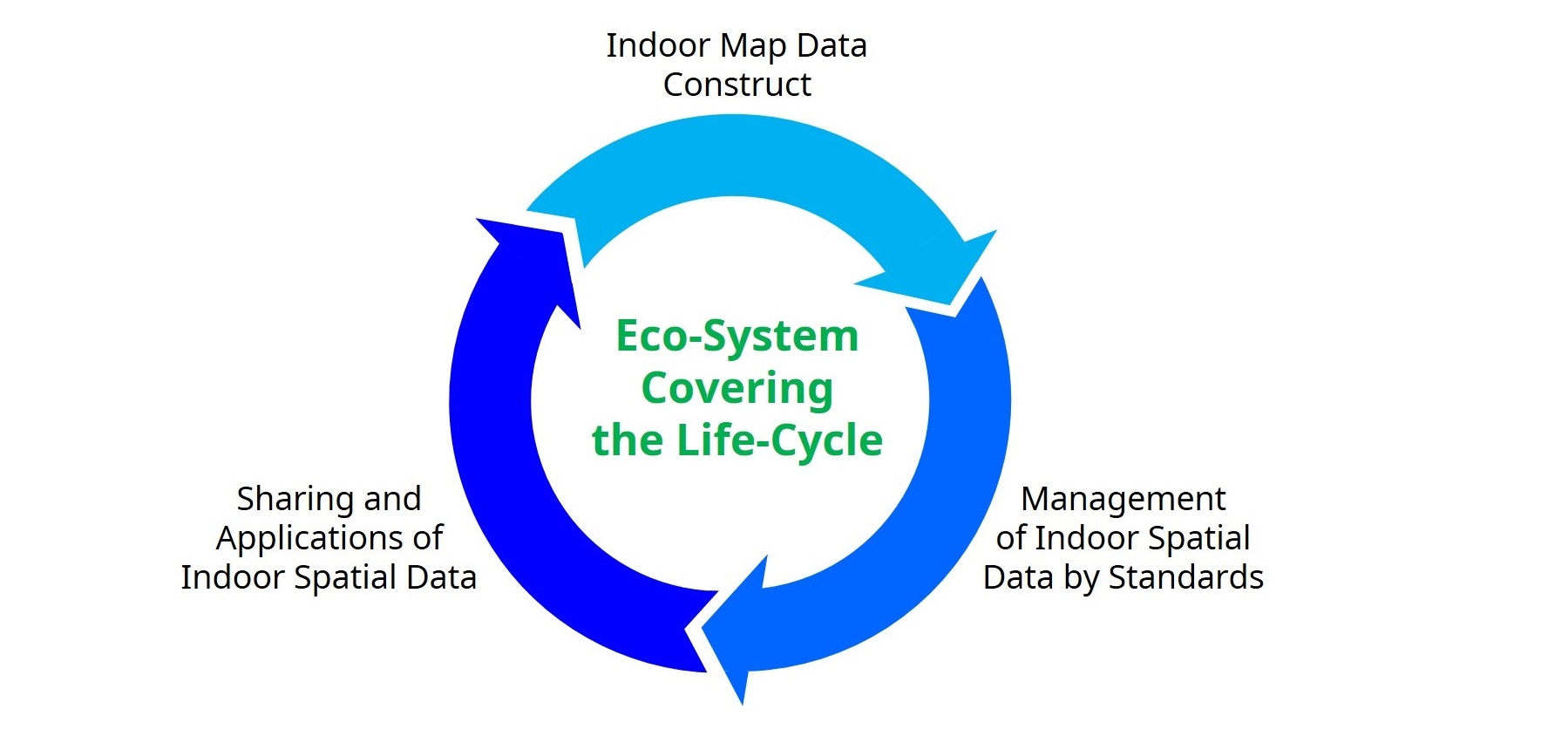
iNous (indoor/outdoor spatial data services) is a large research project funded by the Korean government (official webpage of the project. The main objective is to develop an eco-systems of software for:
- reconstructing indoor maps automatically
- managing these maps in an efficient way
- using these indoor maps in different applications
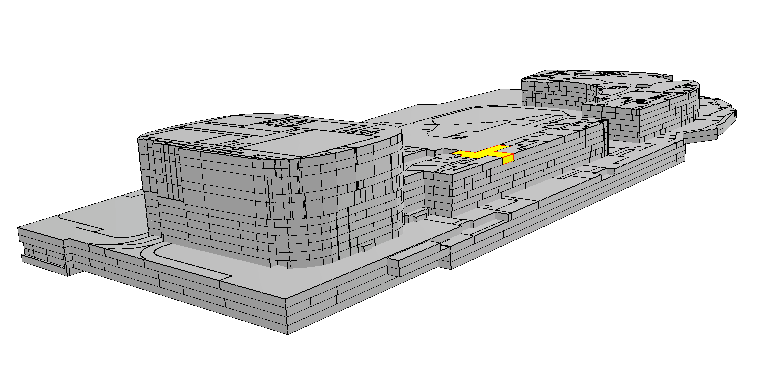
The focus of the project is on the OGC standard IndoorGML, but alternatives formats to represent the indoor of a building and its navigation graph will be sought.
What do we do?
We are responsible for 2 work packages:
1. The validation of IndoorGML files.
This implies validating the geometry, topology, and general consistency of IndoorGML files. We have extended val3dity so that the rooms/cells in IndoorGML are validated, and so that the navigation graph is also validated.
The support for IndoorGML was added in val3dity v2.2.0 (download it there).
@inproceedings{20_3dgeoinfo_indoorgml,
author = {Ledoux, Hugo},
title = {Are your {IndoorGML} files valid?},
booktitle = {Proceedings 15th 3D GeoInfo Conference 2020},
year = {2020},
volume = {VI-4/W1-2020},
pages = {109--118},
publisher = {ISPRS}
2. The develop of a JSON-based encoding for IndoorGML.
Our proposal for IndoorJSON is online, with some software to convert IndoorGML files.
Open-source software and standards
- val3dity (v2.2+ has IndoorGML support out-of-the-box)
- IndoorJSON
