In the Computational Fluid Dynamics (CFD) simulation workflow the geometry preparation step is often regarded as a tedious, time-consuming task. This is why many practitioners consider it as one of the main bottlenecks in the whole simulation process. Geometry preparation generally consists of geometry creation, cleanup, and modification to meet the requirements of CFD software; these operations are usually done (semi) manually. The larger and more complex the geometry, the longer the necessary work, meaning this issue is amplified for urban flows where large areas of complex geometries are involved. To make things worse, 3D city models are usually not constructed with CFD requirements in mind, since the 3D geoinformation, a field that specialises in 3D city modelling, and the fluid dynamics field are disconnected.
We aim to bridge the gap between the two fields and reduce the time involved with the simulation pre-processing step by developing a framework for automatic geometry reconstruction tailored for CFD simulations. The core part of the framework is developed in the C++ programming language, largely utilising the Computational Geometry Algorithms Library (CGAL; an open-source software library \footnote{https://www.cgal.org/}), to perform geometric operations.
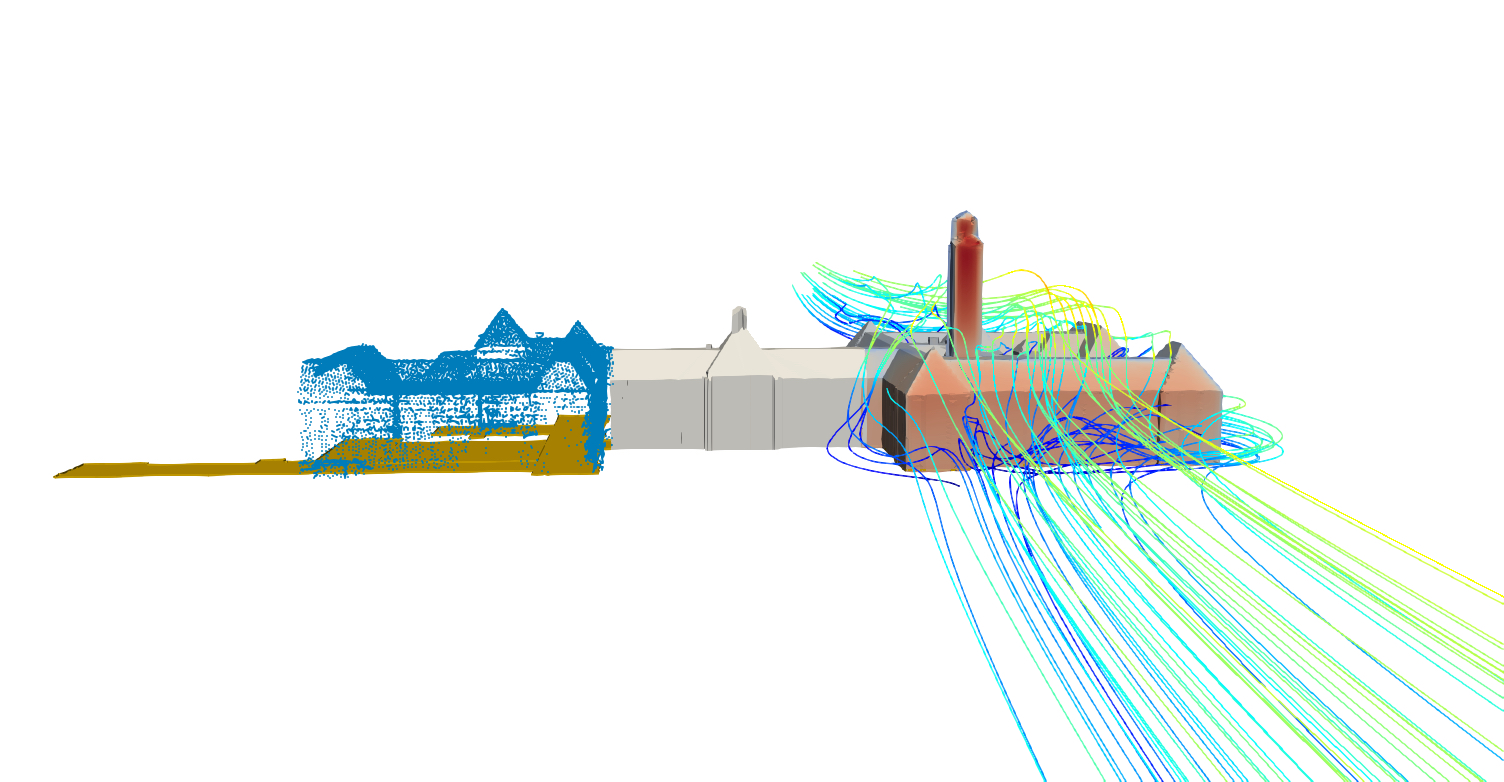
Our framework uses 2D topographic data (polygons) as input and couples them with an airborne Light Detection and Ranging (LiDAR) point cloud to generate the 3D geometry of an urban area; such datasets are often available. We can define four main feature classes within the framework: buildings, terrain, surface layers, and boundaries. According to user input, the algorithm defines the influence region where buildings are explicitly reconstructed and the total extent of the domain. In case point cloud data are not available, extensions to work with user specified heights for the buildings will be also included. The result of the framework is a valid geometry — it is watertight, without overlaps and duplicated vertices, edges or surfaces. The output geometry can be exported in OBJ, STL or CityJSON (standard for 3D city models) file format.
In its current state, the framework lays the groundwork for further developments. They include:
- Automatic definition of the influence zone and boundary size according to best practice guidelines.
- Implementation of advanced building reconstruction algorithms that enable LoD1.3 (multi-segment height per footprint) and LoD2.2 (LoD1.3 plus roof surfaces) reconstruction.
- Footprint simplification to remove small edges that cause problems in the meshing process.
- Tree modelling.
- Reconstruction using other inputs than LiDAR, such as building footprints with elevation data.