An abstract class for Frame Constraints defined by an axis or a plane. More...
#include <easy3d/renderer/constraint.h>
Public Types | |
| enum | Type { FREE , AXIS , PLANE , FORBIDDEN } |
Public Member Functions | |
| AxisPlaneConstraint () | |
| ~AxisPlaneConstraint () override=default | |
Translation constraint | |
| void | constrainTranslation (vec3 &translation, Frame *const frame) override |
| void | setTranslationConstraint (Type type, const vec3 &direction) |
| void | setTranslationConstraintType (Type type) |
| void | setTranslationConstraintDirection (const vec3 &direction) |
| Type | translationConstraintType () const |
| vec3 | translationConstraintDirection () const |
 Public Member Functions inherited from Constraint Public Member Functions inherited from Constraint | |
| virtual | ~Constraint ()=default |
Rotation constraint | |
| void | constrainRotation (quat &rotation, Frame *const frame) override |
| void | setRotationConstraint (Type type, const vec3 &direction) |
| void | setRotationConstraintType (Type type) |
| void | setRotationConstraintDirection (const vec3 &direction) |
| Type | rotationConstraintType () const |
| vec3 | rotationConstraintDirection () const |
Detailed Description
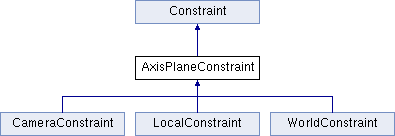
An abstract class for Frame Constraints defined by an axis or a plane.
AxisPlaneConstraint is an interface for (translation and/or rotation) Constraint that are defined by a direction. translationConstraintType() and rotationConstraintType() define how this direction should be interpreted: as an axis (AxisPlaneConstraint::AXIS) or as a plane normal (AxisPlaneConstraint::PLANE). See the Type() documentation for details.
The three implementations of this class: LocalConstraint, WorldConstraint and CameraConstraint differ by the coordinate system in which this direction is expressed.
Different implementations of this class are illustrated in the contrainedCamera and constrainedFrame examples.
- Attention
- When applied, the rotational Constraint may not intuitively follow the mouse displacement. A solution would be to directly measure the rotation angle in screen coordinates, but that would imply to know the QGLViewer::camera(), so that we can compute the projected coordinates of the rotation center (as is done with the QGLViewer::SCREEN_ROTATE binding). However, adding an extra pointer to the QGLViewer::camera() in all the AxisPlaneConstraint derived classes (which the user would have to update in a multi-viewer application) was judged as an overkill.
Member Enumeration Documentation
◆ Type
| enum Type |
Type lists the different types of translation and rotation constraints that are available.
It specifies the meaning of the constraint direction (see translationConstraintDirection() and rotationConstraintDirection()): as an axis direction (AxisPlaneConstraint::AXIS) or a plane normal (AxisPlaneConstraint::PLANE). AxisPlaneConstraint::FREE means no constraint while AxisPlaneConstraint::FORBIDDEN completely forbids the translation and/or the rotation.
See translationConstraintType() and rotationConstraintType().
- Attention
- The AxisPlaneConstraint::PLANE Type is not valid for rotational constraint.
New derived classes can use their own extended enum for specific constraints:
Constructor & Destructor Documentation
◆ AxisPlaneConstraint()
Default constructor.
translationConstraintType() and rotationConstraintType() are set to AxisPlaneConstraint::FREE. translationConstraintDirection() and rotationConstraintDirection() are set to (0,0,0).
◆ ~AxisPlaneConstraint()
|
overridedefault |
Virtual destructor. Empty.
Member Function Documentation
◆ constrainRotation()
Overloading of Constraint::constrainRotation(). Empty.
Reimplemented from Constraint.
Reimplemented in CameraConstraint, LocalConstraint, and WorldConstraint.
◆ constrainTranslation()
Overloading of Constraint::constrainTranslation(). Empty
Reimplemented from Constraint.
Reimplemented in CameraConstraint, LocalConstraint, and WorldConstraint.
◆ rotationConstraintDirection()
|
inline |
Returns the axis direction used by the rotation constraint.
This direction is defined only when rotationConstraintType() is AxisPlaneConstraint::AXIS.
The AxisPlaneConstraint derived classes express this direction in different coordinate system (camera for CameraConstraint, local for LocalConstraint, and world for WorldConstraint). This value can be modified with setRotationConstraintDirection().
◆ rotationConstraintType()
◆ setRotationConstraint()
Simply calls setRotationConstraintType() and setRotationConstraintDirection().
◆ setRotationConstraintDirection()
| void setRotationConstraintDirection | ( | const vec3 & | direction | ) |
Defines the rotationConstraintDirection(). The coordinate system where direction is expressed depends on your class implementation.
◆ setRotationConstraintType()
| void setRotationConstraintType | ( | Type | type | ) |
Set the Type() of the rotationConstraintType(). Default is AxisPlaneConstraint::FREE.
Depending on this value, the Frame will freely rotate (AxisPlaneConstraint::FREE), will only be able to rotate around an axis (AxisPlaneConstraint::AXIS), or will not able to rotate at all (AxisPlaneConstraint::FORBIDDEN).
Use Frame::setOrientation() to define the orientation of the constrained Frame before it gets constrained.
- Attention
- An AxisPlaneConstraint::PLANE Type() is not meaningful for rotational constraints and will be ignored.
◆ setTranslationConstraint()
Simply calls setTranslationConstraintType() and setTranslationConstraintDirection().
◆ setTranslationConstraintDirection()
| void setTranslationConstraintDirection | ( | const vec3 & | direction | ) |
Defines the translationConstraintDirection(). The coordinate system where direction is expressed depends on your class implementation.
◆ setTranslationConstraintType()
|
inline |
Sets the Type() of the translationConstraintType(). Default is AxisPlaneConstraint::FREE.
◆ translationConstraintDirection()
|
inline |
Returns the direction used by the translation constraint.
It represents the axis direction (AxisPlaneConstraint::AXIS) or the plane normal (AxisPlaneConstraint::PLANE) depending on the translationConstraintType(). It is undefined for AxisPlaneConstraint::FREE or AxisPlaneConstraint::FORBIDDEN.
The AxisPlaneConstraint derived classes express this direction in different coordinate system (camera for CameraConstraint, local for LocalConstraint, and world for WorldConstraint). This value can be modified with setTranslationConstraintDirection().
◆ translationConstraintType()
|
inline |
Returns the translation constraint Type().
Depending on this value, the Frame will freely translate (AxisPlaneConstraint::FREE), will only be able to translate along an axis direction (AxisPlaneConstraint::AXIS), will be forced to stay into a plane (AxisPlaneConstraint::PLANE) or will not able to translate at all (AxisPlaneConstraint::FORBIDDEN).
Use Frame::setPosition() to define the position of the constrained Frame before it gets constrained.
The documentation for this class was generated from the following files:
- G:/3_code/Easy3D/easy3d/renderer/constraint.h
- G:/3_code/Easy3D/easy3d/renderer/constraint.cpp