Block Assembly for Global Registration of Building Scans
ACM Transactions on Graphics, Vol. 35, No. 6, Nov. 2016 (SIGGRAPH Asia 2016)
Feilong Yan, Liangliang Nan, Peter Wonka
Visual Computing Center, KAUST
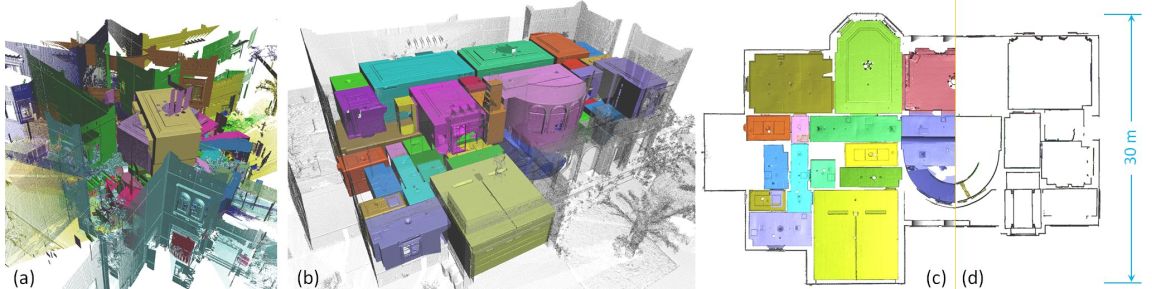
Figure 1: Although buildings usually consist of isolated rooms (e.g., bedrooms, bathrooms, etc.), our method can register the individual scans of these rooms, along with the scans of the building exterior into a single point cloud. (a) The input scans rendered with different colors. (b) Our registration result. The rooms are rendered with distinct colors and the exterior of the building is down-sampled and rendered in a uniform gray color. (c) A top view of the registered rooms in the first floor. (d) A cross section of the registered data in (b) at 2:0m from the ground.
Abstract
We propose a framework for global registration of building scans. The first contribution of our work is to detect and use portals (e.g. doors and windows) to improve the local registration between two scans. Our second contribution is an optimization based on a linear integer programming formulation. We abstract each scan as a block and model the block registration as an optimization problem that aims at maximizing the overall matching score of the entire scene. We propose an efficient solution to this optimization problem by iteratively detecting and adding local constraints. We demonstrate the effectiveness of the proposed method on buildings of various styles and we show that our approach is superior to the current state of the art.
Results
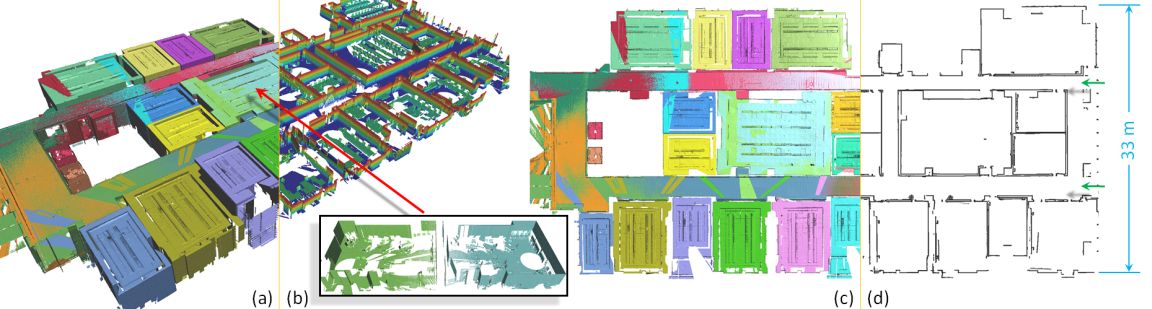
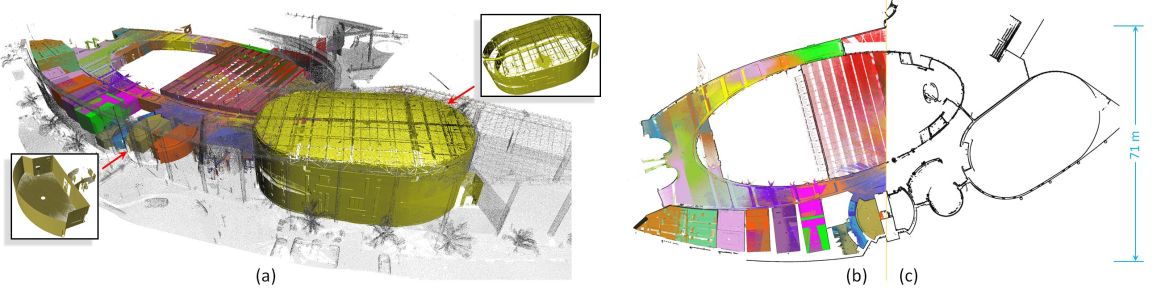
Figure 3: Registration result of a sports center consisting of 8 isolated rooms positioned along a curved hallway. (a) The registered scans. (b) A top view of the registration result. (c) A cross section of the registered scans. Individual scans are coded in different colors.
Figure 4: Registration result of another sports center consisting of 26 individual rooms. (a) The registered scans. (b) A top view of the registration result. (c) A cross section of the registered scans. Individual scans are coded in different colors.
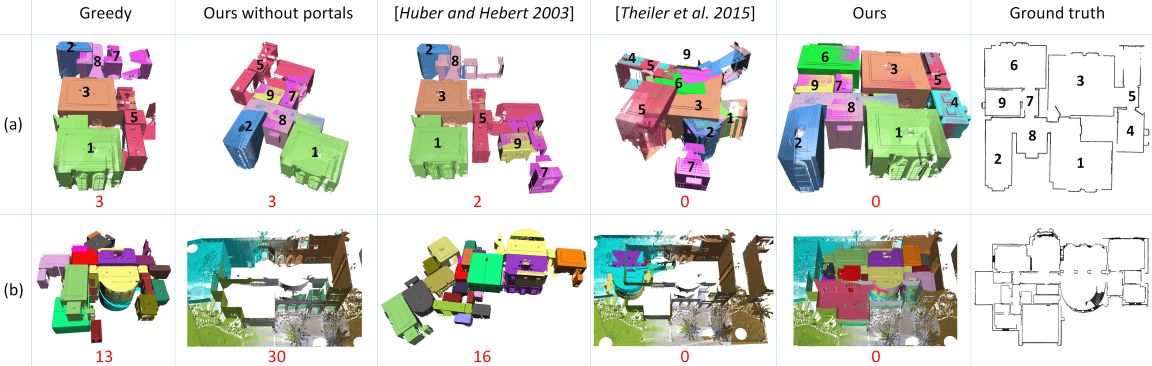
Figure 5: Comparisons of our global registration method with four competing methods on two sets of scans. (a) The scans of the second floor of the building shown in Figure 11 of our paper. (b) The scans of the entire building shown in Figure 1 of our paper. The value at the bottom of each sub-figure indicates the number of scans that cannot be registered by the corresponding method.
Paper [21M .pdf]
Video [102M .mp4]
Slides [134M .pptx]
Acknowledgements
We thank the reviewers for their valuable comments, Virginia Unkefer for proofreading, and FalconViz for lending us the Leica ScanStation C10 laser scanner. We also thank NVIDIA Corporation for the donation of the Quadro K5200 GPU used for rendering the point clouds. This work was supported by the Office of Sponsored Research (OSR) under Award No. OCRF-2014-CGR3-62140401 and the Visual Computing Center at KAUST.
BibTex
@article{yan2016block,
title = {Block assembly for global registration of building scans},
author = {Yan, Feilong and Nan, Liangliang and Wonka, Peter},
journal = {ACM Transactions on Graphics (TOG)},
volume = {35},
number = {6},
pages = {237},
year = {2016},
publisher = {ACM}
}