RESSO: Real-world Scans with Small Overlap
This dataset is part of our following work on point cloud registration:
Songlin Chen, Liangliang Nan, Renbo Xia, Jibin Zhao, and Peter WonkaPLADE: A Plane-based Descriptor for Point Cloud Registration with Small Overlap
IEEE Transactions on Geoscience and Remote Sensing, 58(4), 2530-2540, 2020
Developing reliable point cloud registration approaches brings up significant challenges in evaluation tasks that involves capturing massive datasets and providing ground truth registrations. Unfortunately, very limited data sets are available and are typically created for specific environments by using a single type of scanner and typically have only a few scan pairs. The lack of diverse data sets (e.g., different environments, acquired using different sensors) and accurate ground-truth has caused various point cloud registration techniques to be poorly and unfairly evaluated. In fact, existing techniques can only be evaluated against small carefully crafted data sets. To address this issue, we provide a benchmark dataset scanned from a set of indoor and outdoor scenes with varying overlapping ratios, complementing existing datasets. As for evaluation, the performance of a registration method can be simply measured by the percentage of the successfully registered scans.
Looking for a point cloud registration method for man-made scenes? You may use the method proposed in the above mentioned paper (source code available). Though our experiments demonstrate that our method significantly outperforms the state of the art, a large portion of point clouds still remain unregistered. This indicates that the registration problem is far from being solved, allowing significant room for improvement.
Data collection. Our data acquisition involves two different types of commercial scanners: a high-range static laser scanner (Leica ScanStation C10, with an effective operating range of 100 meters) and a hand-held scanner (FARO Freestyle X, operating range 3 meters). These two scanners have significantly different operating ranges, accuracy, and resolutions, posing sufficient challenges to registration algorithms. We scanned 187 point clouds in total for 15 different environments (10 indoor scenes and 5 outdoor scenes). Each indoor scene is captured by a few global point clouds using the static laser scanner and optionally multiple local point clouds using the hand-held scanner. The global point clouds capture the majority of each indoor scene and the local point clouds are intended to capture local regions of the scene, especially the regions that are occluded in the global point clouds. This further adds to the challenges for registration. Due to larger sizes, the outdoor scenes are mainly captured using the longrange static laser scanner. We scanned the scenes without adding additional clutter for augmenting naturally occurring features and we tried to create some overlap, but not an excessive amount. Also, the fact that the point clouds stem from different scanners is a possible challenge for some feature extractors.

Fig. 1 Scanners used for data acquisition of RESSO. Left: Leica ScanStation C10. Right: FARO Freestyle X
Overlap between scans. Real-world scans typically have unpredictable varying overlap ratios, which is challenging to registration algorithms. We choose to quantify the overlap of two point clouds by measuring the percentage of points that have the closest corresponding point (in another scan of the pair) closer than a threshold. Considering noises in the input point clouds and the unavoidable errors in the registration, we compute the overlap for each scan pair at a discrete set of threshold values. We depict these discrete overlap values in a curve, so as to intuitively reveal the overlap between scans. The following figure demonstrates the overlap curves for a few point cloud pairs from RESSO and other datasets. From these curves, we can see that RESSO has less but a wider range of overlap. Thus, our new dataset is a more challenging and a useful complement to existing datasets.
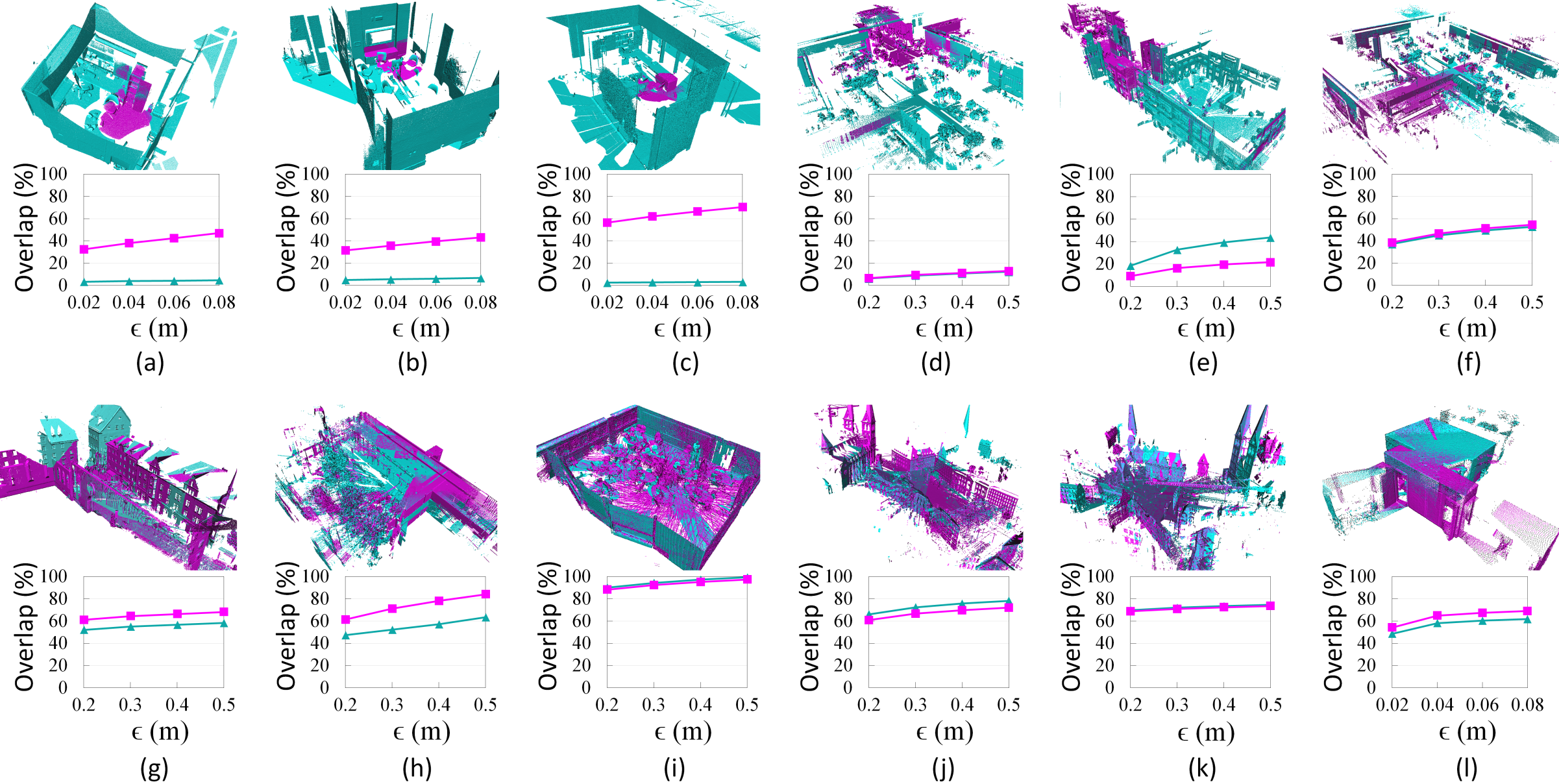
Fig. 2 Overlap of point cloud pairs. Top row: scan pairs from RESSO. Bottom row: scan pairs from other existing datasets. The corresponding overlap curve is shown below each scan pair.
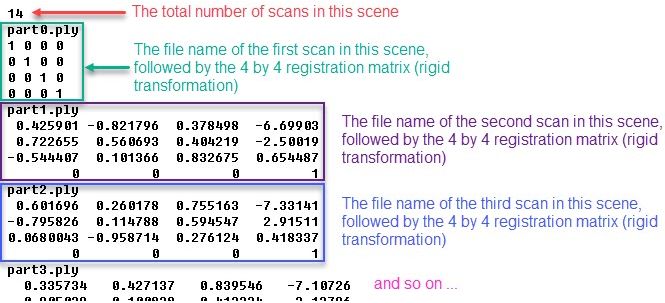
Ground truth registration. Given the challenges in the registration problem itself and the large number of scans, we obtain ground truth registrations using a combination of automatic approaches and manual registration. Specifically, we run our registration algorithm (described in this paper) on the point clouds of each scene and we record the transformation matrices of the successfully registered point clouds by visual inspection and fine tuning of the registration using ICP. For those failed to be registered in the automatic phase, we manually registered them as initialization to ICP.
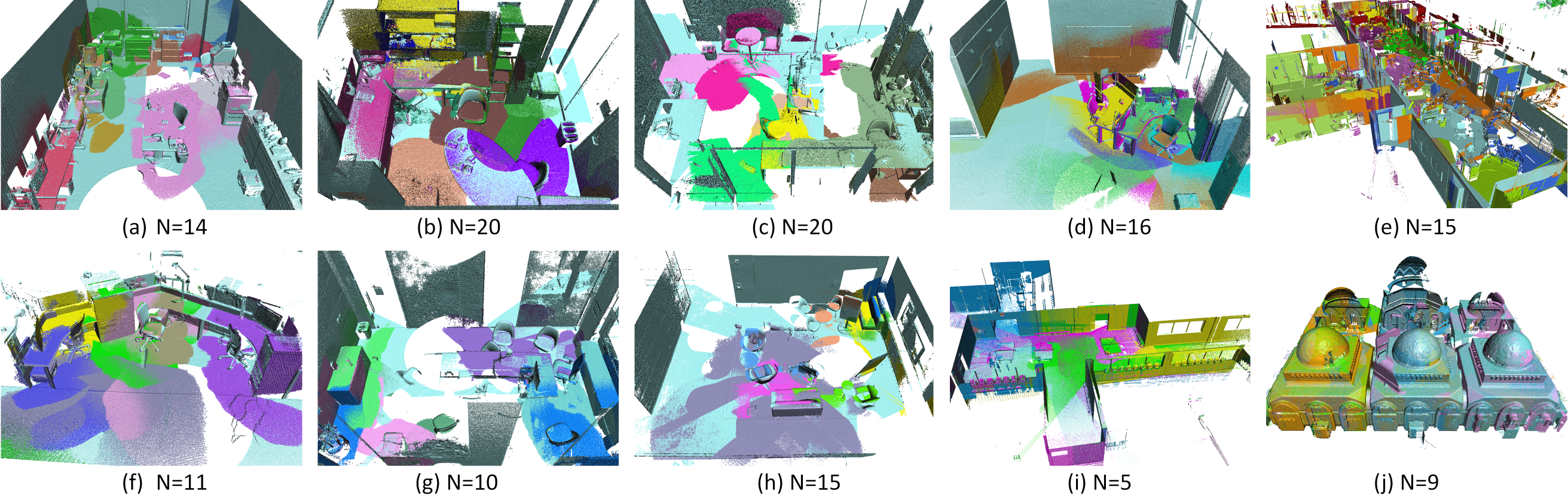
Fig. 3 Indoor scenes (registration results of our method PLADE). The ceilings have been removed to better reveal the building interiors. The number bellow
each subfigure indicates the total scans in each scene.

Fig. 4 Outdoor scenes (registration results of our method PLADE). The number bellow each subfigure indicates the total scans in each scene.
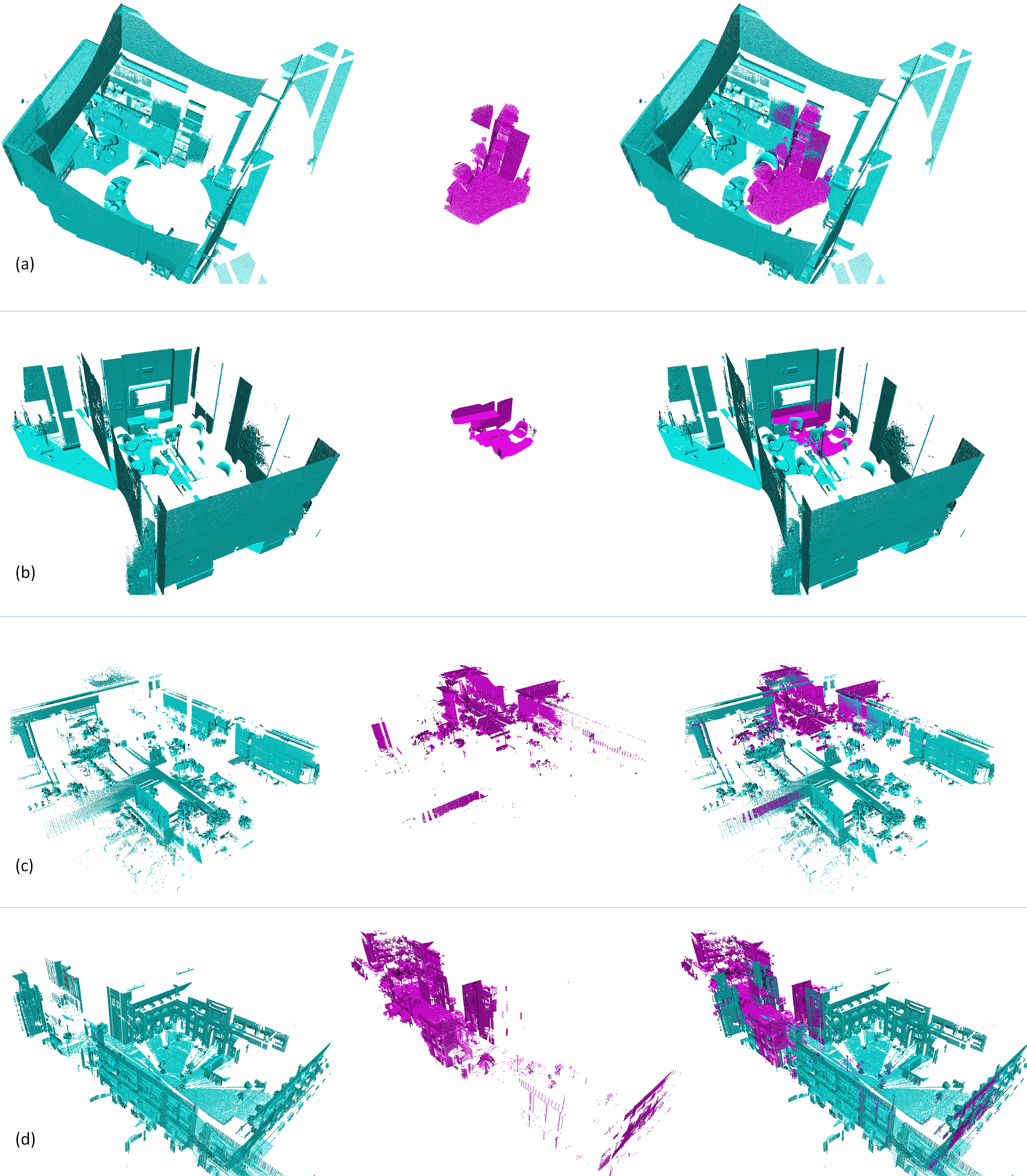
Fig. 5 A few scan pairs from our dataset, intended to reveal the overlaps between scans. The first two columns show the input scan pairs and the right column shows the registration results of our our method PLADE.
@article{chen2017plade,
title = {PLADE: A Plane-based Descriptor for Point Cloud Registration with Small Overlap},
author = {Chen, Songlin and Nan, Liangliang and Xia, Renbo and Zhao, Jibin and Wonka, Peter},
booktitle = {IEEE Transactions on Geoscience and Remote Sensing},
volume={58},
number={4},
pages={2530-2540},
year = {2020}
}